Now At: $5,000 (1 bid)
Estimate: $35,000+
Ends on 05/15
Estimate: $30,000+
Now At: $2,500 (1 bid)
Now At: $2,200 (2 bids)
Estimate: $20,000+
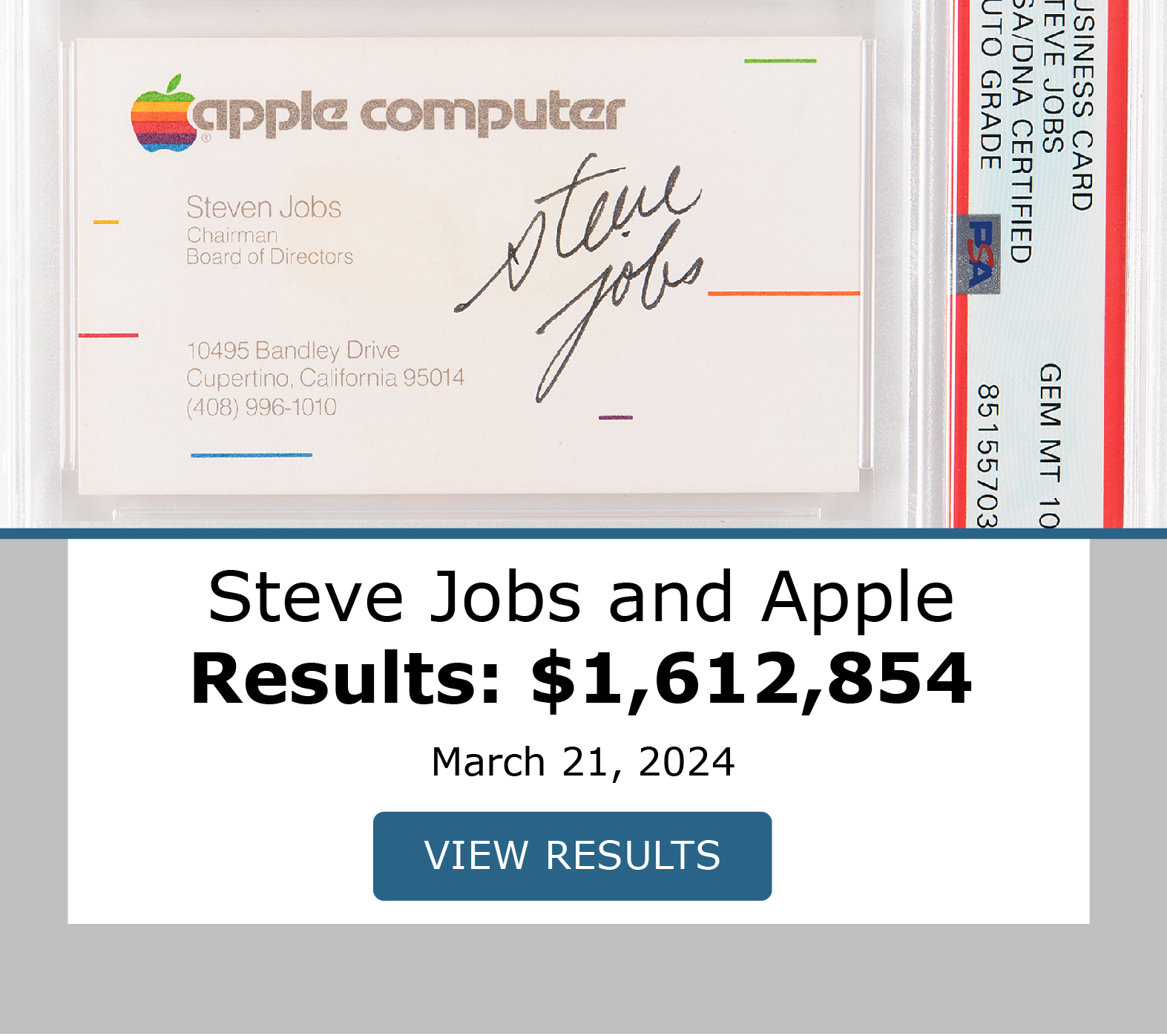
Now At: $1,612 (6 bids)
Estimate: $10,000+
Now At: $1,465 (5 bids)
Now At: $1,331 (4 bids)
Now At: $1,210 (3 bids)
Estimate: $8,000+
We use cookies on this site to improve your experience. By using this site, you accept our use of cookies. To learn more, please see our Privacy Policy.